故障描述:由于机器人焊钳编码器线损坏导致机器外部轴机械零点丢失,无法正常工作。操作流程如下第一步:记录外部轴零点丢失时,程序指针的当前位置,点击取消程序,进入示教器主菜单,选择投入运行--调整--去调节(如图1)。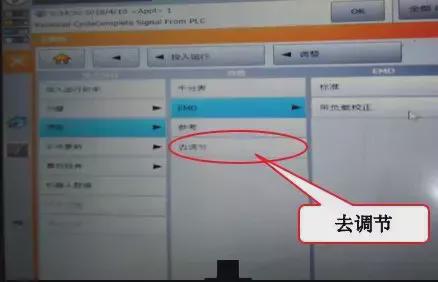 第二步:选择外部轴,并点击取消校正(如图2)。 第二步:选择外部轴,并点击取消校正(如图2)。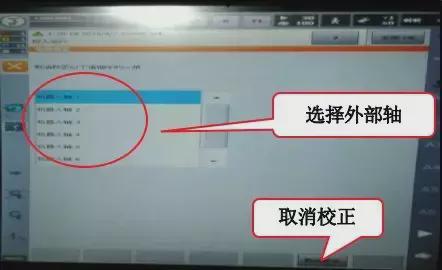 第三步:将机器人焊钳旧帽换成新帽,同时选择附加轴,按住E1处+,直到焊钳两个电极帽之间恰好贴合(如图3)。 第三步:将机器人焊钳旧帽换成新帽,同时选择附加轴,按住E1处+,直到焊钳两个电极帽之间恰好贴合(如图3)。 第四步:进入示教器主菜单,选择投入运行-调整-千分表`,选择E1轴(如图4)。 第四步:进入示教器主菜单,选择投入运行-调整-千分表`,选择E1轴(如图4)。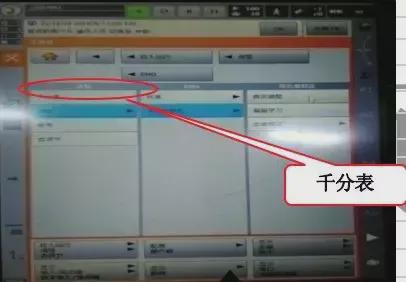 第五步:界面显示E1轴,点击校正,示教器显示E1校正完毕,手动运行换帽和修磨程序(如图5)。 第五步:界面显示E1轴,点击校正,示教器显示E1校正完毕,手动运行换帽和修磨程序(如图5)。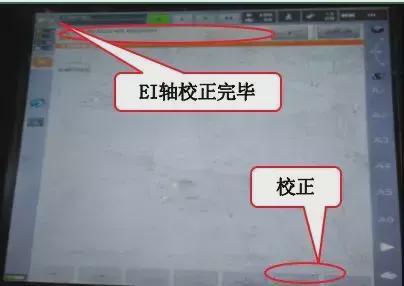 第六步:运行机器人程序进行轨迹验证。备注:1.焊钳零点需换成新的电极帽;2.校准完毕后需要进行修磨,并验证焊接质量。 第六步:运行机器人程序进行轨迹验证。备注:1.焊钳零点需换成新的电极帽;2.校准完毕后需要进行修磨,并验证焊接质量。
|
机器人焊钳零点丢失故障快速处理流程
时间:2024-10-21 22:09 来源:网络整理 转载:我的网站